Research
新着情報 What's News
リンク Link


Transportation Robot [ July 2010 ~ April 2012 ] |
Platform |
|
Trabot • Length: 0.8m, Height: 1.0m, Width: 0.5m • 2 motors for steering, another 2 for propulsion • Top speed : 1.0m/sec (flat ground, no rider condition)  Fig. 1 Transportation robot platform |
Research Contents |
|
Lane extraction • Image processing, segmentation, clustering and labeling methods are used • Lane extracted stably by picking up features generated by using segmentation and clustering • Extracted lane markers are useful to local localization in outdoor 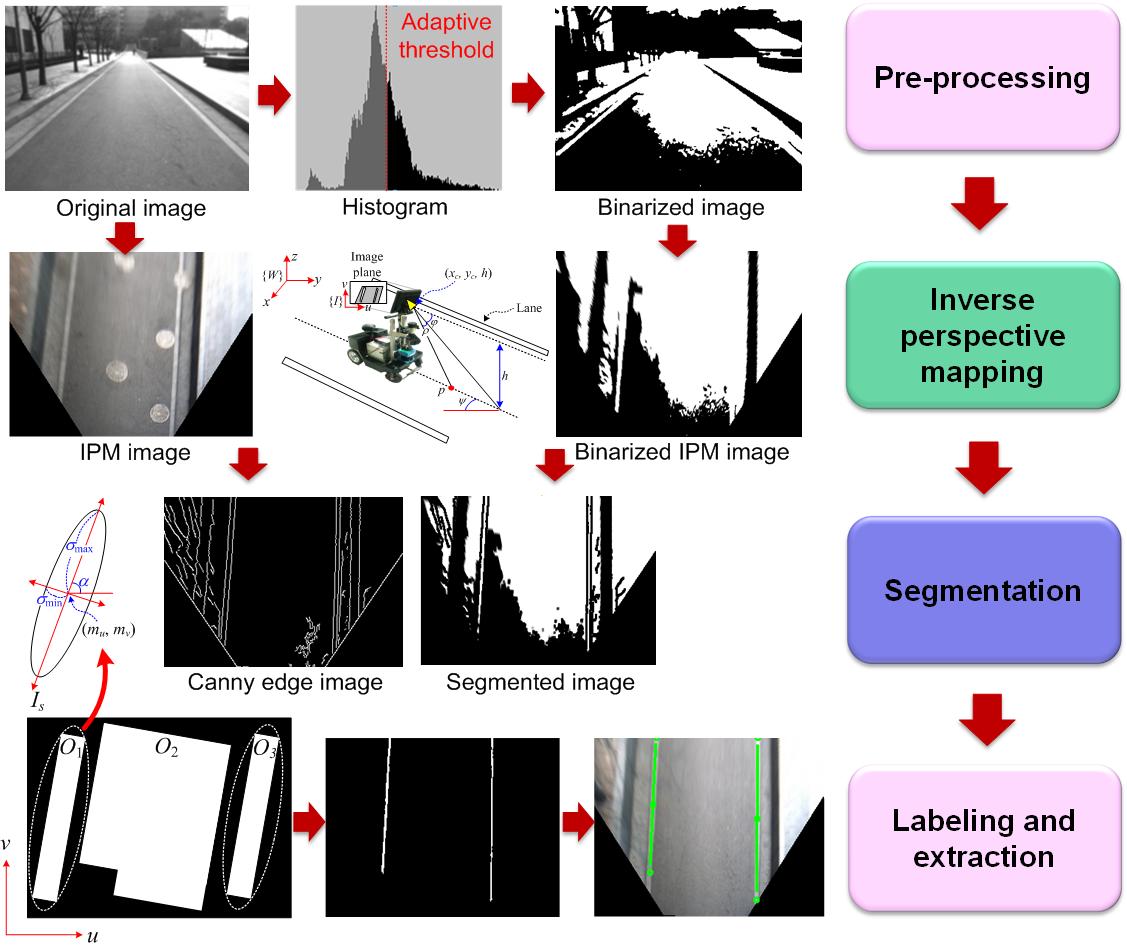 Fig. 2 Image processing to extract lane feature |
|
Obstacle avoidance • DWA (dynamic windows approach) • Simultaneous obstacle avoiding algorithm • Dynamic window : Area in velocity space to reach without collision to obstacle during the given time step with given robot velocity • Determining the velocity in the dynamic window to reach the goal point fast 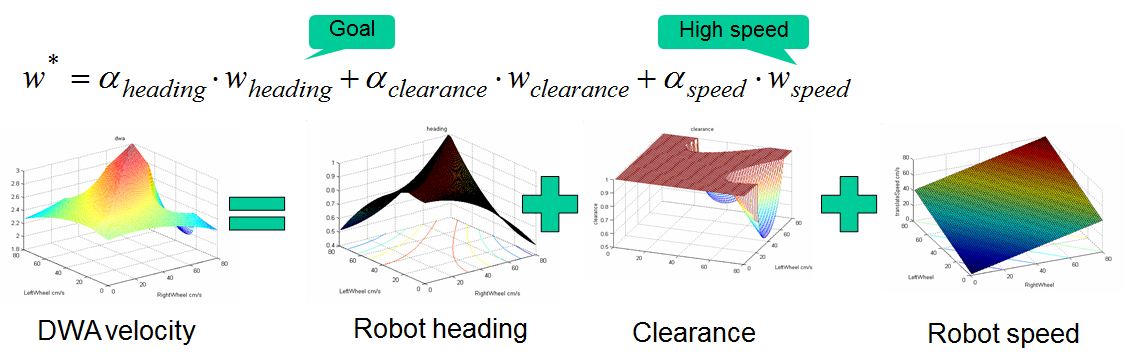 Fig. 3 Determining DWA velocity from objective function Mov. 1 DWA-based obstacle avoidance |
Related Paper |
|
• Yong-Hoon Ji, Ji-Hun Bae, Jae-Bok Song, Joo-Hyun Baek, and Jae-Kwan Ryu, “Outdoor Localization through GPS Data and
Matching of Lane Markers for a Mobile Robot,” Journal of Institute of Control, Robotics and Systems, Vol. 18, No. 6, pp. 594-600, June, 2012.
|