Research
新着情報 What's News
リンク Link


Surveillance Robot [ January 2011 ~ December 2011 ] |
Platform and Sensor Configuration |
|
Jaguar • Length: 0.65m, Height: 0.2m, Width: 0.66m • 2 tracks for driving and steering, 2 flipper arms (stair climbing is available) • Max speed : 1.5m/s, slope mobility : 45°, max payload : 15kg 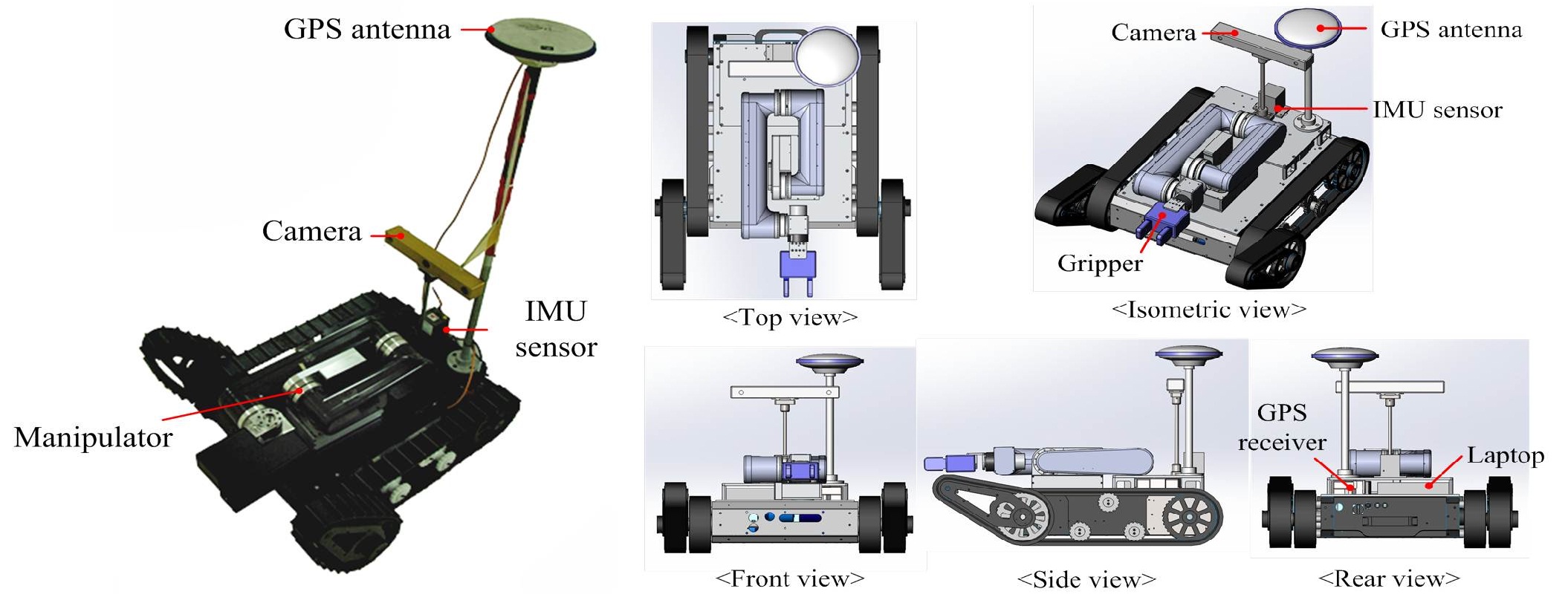 Fig. 1 Platform and sensor configuration |
Research Contents |
|
GPS-based outdoor localization • Extended Kalman filter (EKF)-based sensor fusion • Odometry and roll, pitch yaw from IMU : used for prediction process of EKF • GPS : used for update process of EKF 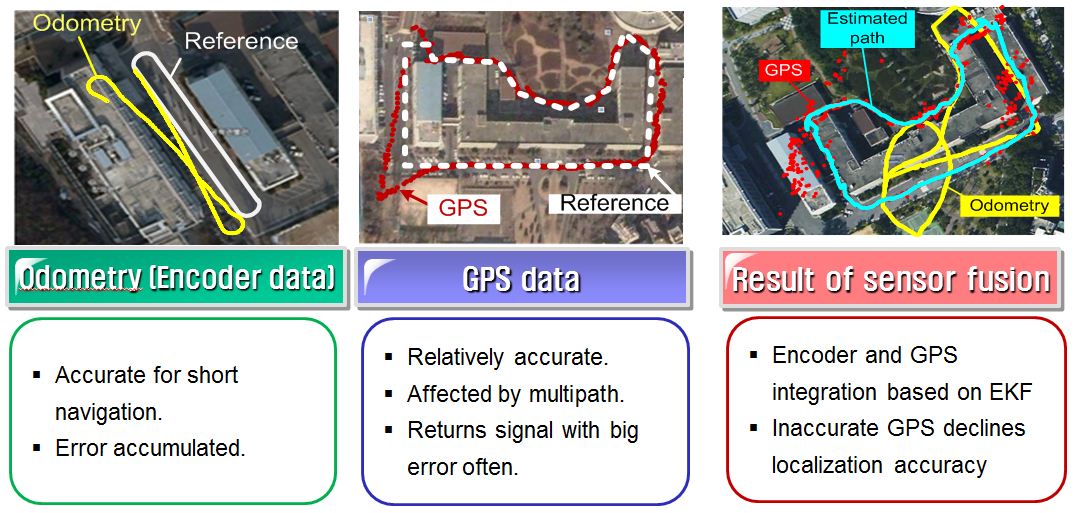 Fig. 2 EKF-based outdoor localization by using wheel odometry and GPS information |
|
Gradient method-based outdoor global path planning • Optimal path generation using map information from initial position of robot to goal • Extended 2D gradient method • Local minimum problem can be avoided • Traversability map is used 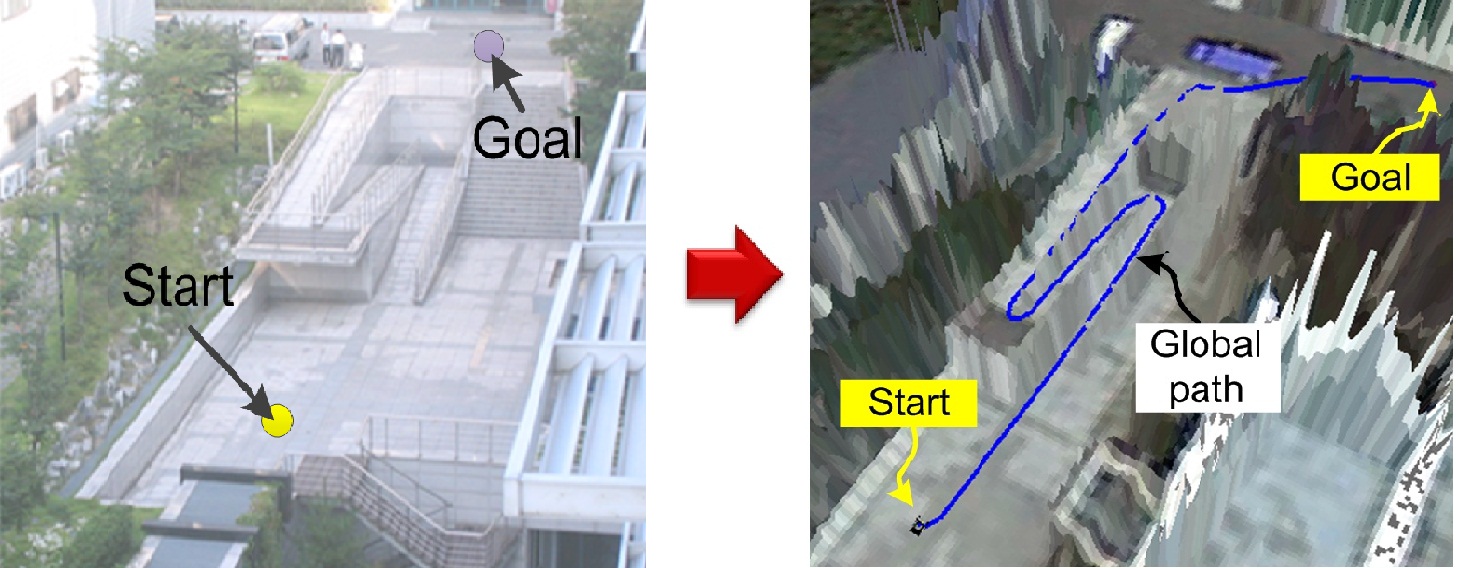 Fig. 3 Global path extraction by gradient method |
|
Implementation of a manipulator on tracked robot • Mobile tracked robot + 4DOF manipulator based on stabilization control • Efficient unmanned surveillance • Absorbing vibration at rugged terrain while driving Mov. 1 Manipulator with stabilization control |
|
Autonomous navigation • Environment : indoor and outdoor • Localization, path planning and motion control algorithms are integrated Mov. 2 Autonomous navigation of tracked robot |
Related Patent |
|
• Jae-Bok Song, Yong-Hoon Ji, Jae-Kwan Ryu, Jong-Won Kim, and Joo-Hyun Baek, “ Apparatus for estimating
location of moving object for autonomous driving,” Korean Intellectual Property Office (KIPO), #10-2012-0025468.
• Jae-Bok Song, Yong-Hoon Ji, Jae-Kwan Ryu, Jong-Won Kim, and Joo-Hyun Baek, “Method for estimating location of mobile robot,” Korean Intellectual Property Office (KIPO), #10-2012-0025469. |