Research
新着情報 What's News
リンク Link


UGV [ January 2010 ~ March 2013 ] |
Platform and Sensor Configuration |
|
Pioneer 3AT (all terrain) • The most popular outdoor robot • Length: 0.65m, Height: 0.2m, Width: 0.66m • Max speed : 0.7m/s, slope mobility : 25°, max payload : 30kg 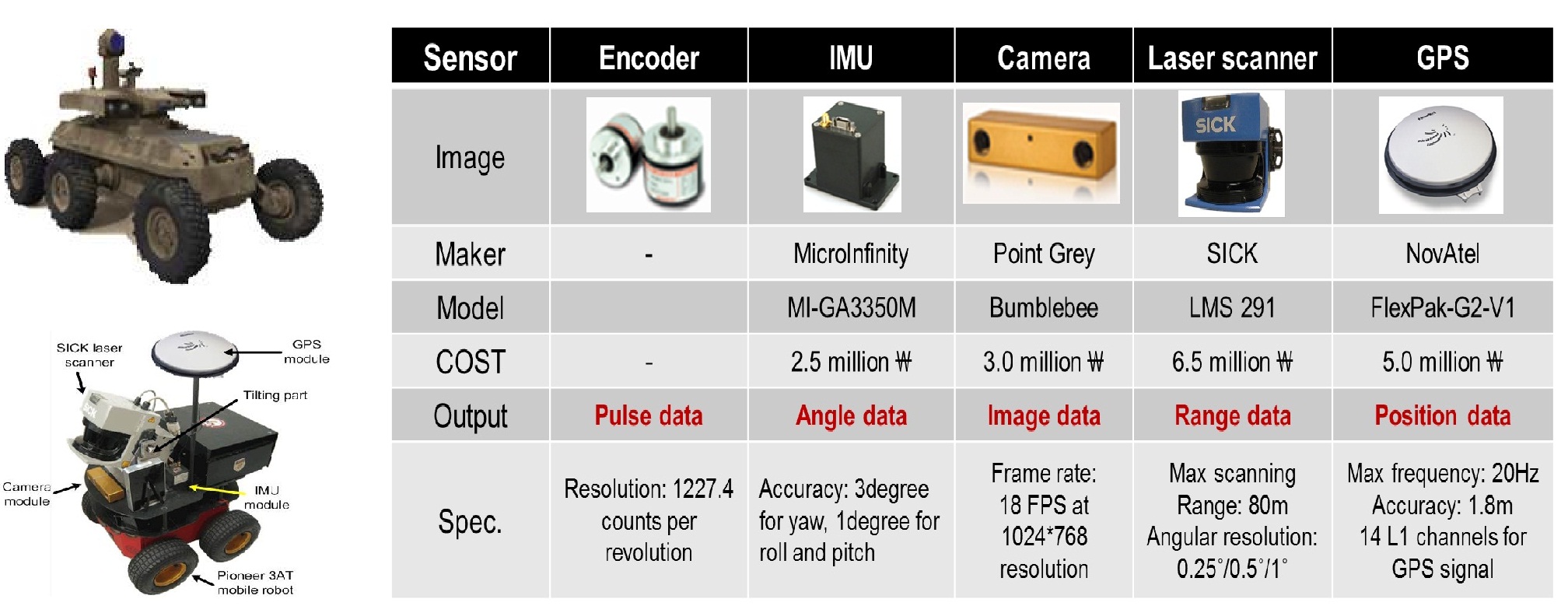 Fig. 1 Platform and sensor configuration |
Research Contents |
|
DSM (digital surface model) • Most popular maps to represent outdoor environments generated using an aerial mapping system • Digital representation of ground surface using 2D grids • Each grid has a single elevation information (2.5D) • There are many discrepancies (DSM vs. real environment) 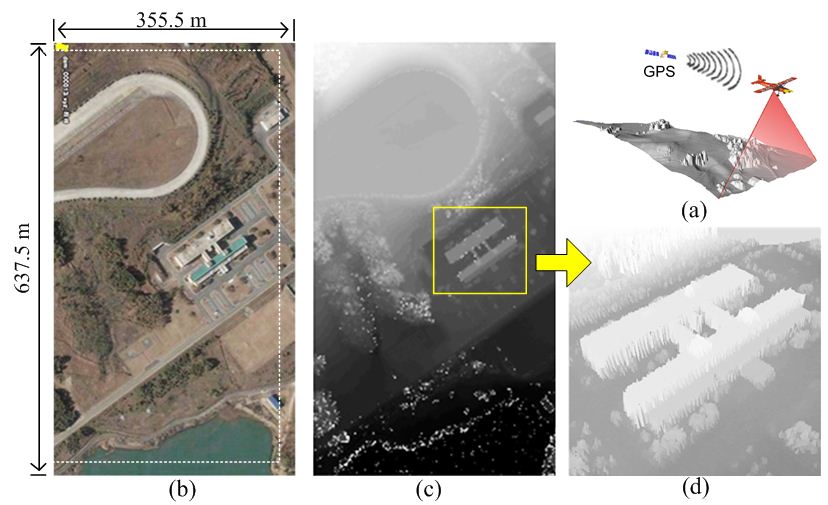 Fig. 2 Example of DSM built by aerial mapping system |
|
Local 3D Map • Accurate representation of the real outdoor environments built by a robot with tilting laser scanner • Each grid contains the number of surface level and the minimum, maximum elevation at each level • ICP (iterative closest points)-based integration of local maps (outdoor SLAM) 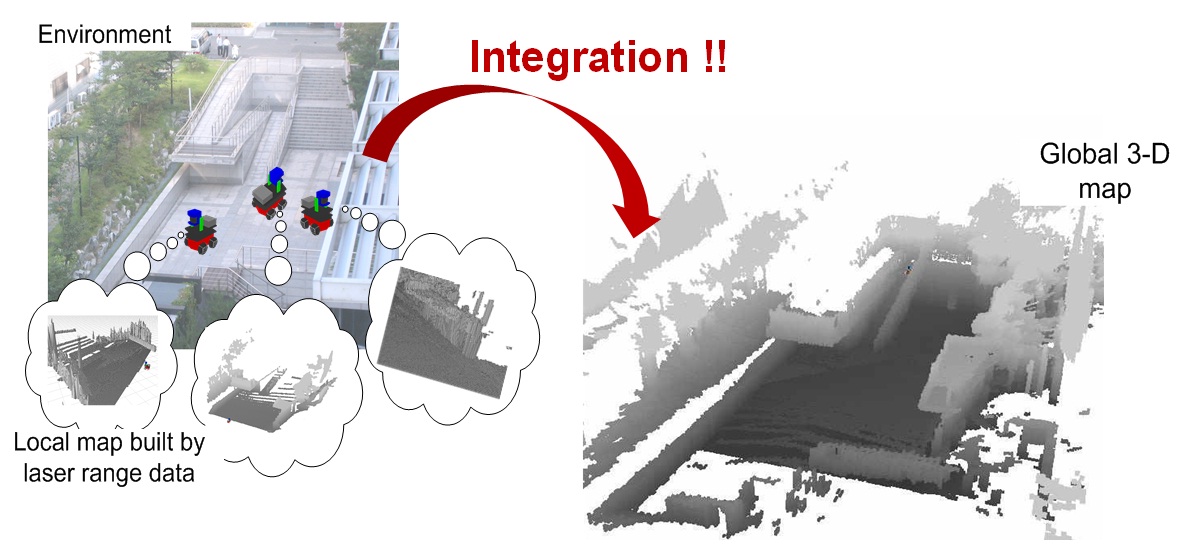 Fig. 3 ICP-based outdoor 3D SLAM |
|
Combination of DSM and Satellite Image for Virtual Reality • Texture mapping on DSM using satellite image • We can confirm the understanding of environment become much easier than before combination of satellite image 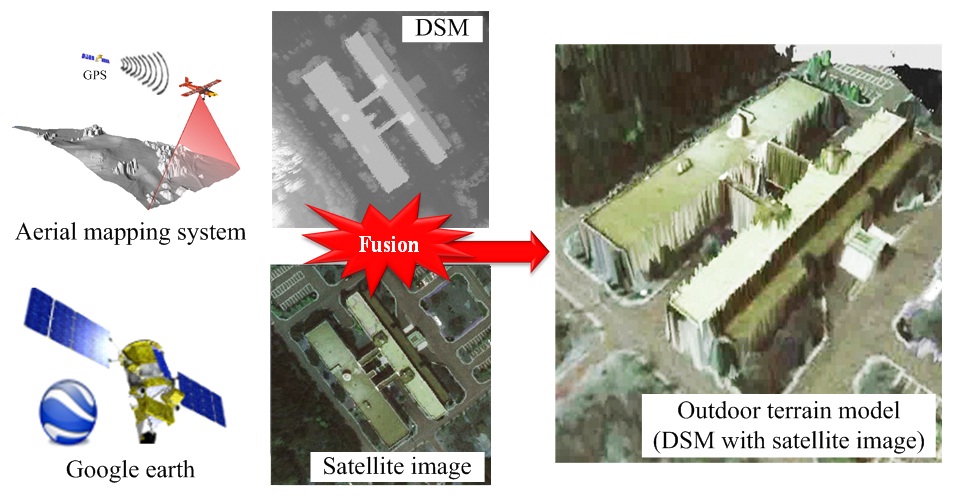 Fig. 4 Combination of DSM and satellite image for virtual reality |
|
Particle filter-based outdoor localization • Localization by matching the environment model and sensor data • Reference map is built by aerial mapping system or robot with tilting laser scanner • Monte Carlo localization (MCL): based on range sensor for map matching 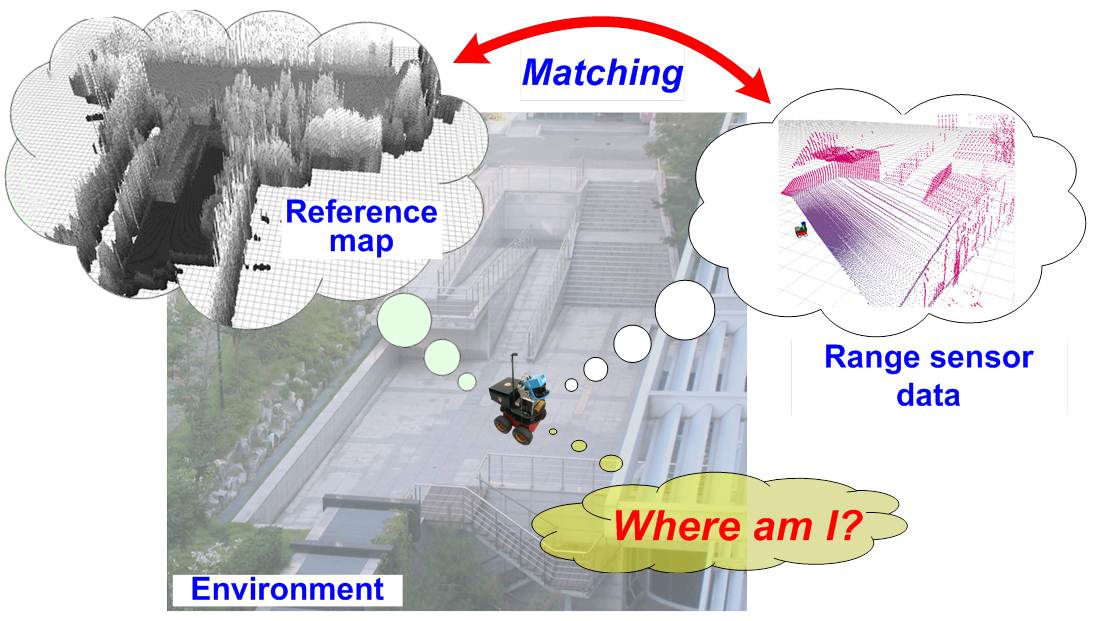 Fig. 5 Concept of map matching-based outdoor localization Mov. 1 Particle filter-based local localization based on DSM |
|
Accurate update of DSM by using local 3D map • To overcome the limitation of DSM representation • 2.5D DSM and local 3D map can be represented at once 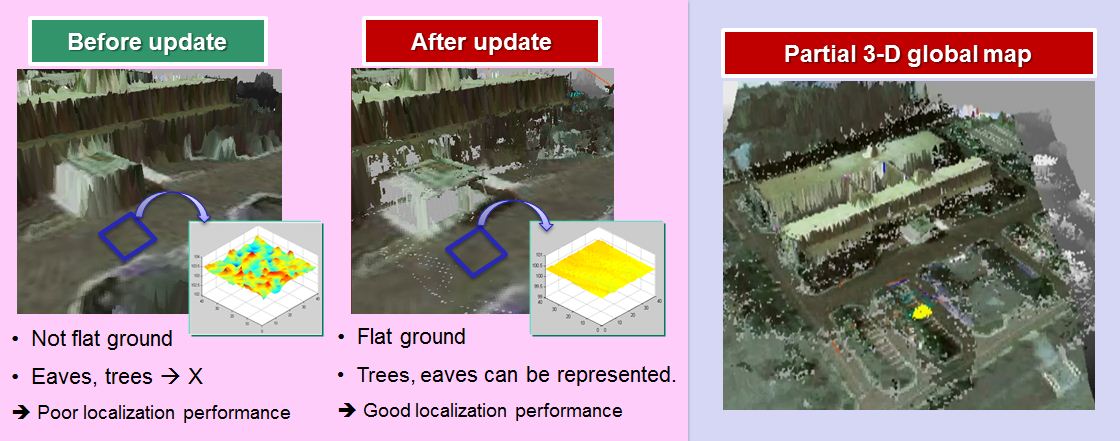 Fig. 6 Effect of updating DSM: non-updated DSM built by aerial mapping system, and updated DSM fused with local elevation map Mov. 2 Accurate update of DSM by using local 3D map |
Related Paper |
|
• Yong-Ju Lee, Yong-Hoon Ji, Jae-Bok Song, and Sang-Hyun Joo, “Performance Improvement of ICP-
based Outdoor SLAM Using Terrain Classification,” Proceeding of the International Conference on Advanced Mechatronics (ICAM 2010),
pp. 243-246, October, 2010, Osaka, Japan.
• Yong-Hoon Ji, Sung-Ho Hong, Jae-Bok Song, and Ji-Hoon Choi, “DSM Update for Robust Outdoor Localization Using ICP-based Scan Matching with COAG Features of Laser Range Data,” Proceeding of the IEEE/SICE International Symposium on System Integration (SII 2011), pp. 1245-1250, December 2011, Kyoto, Japan. |