Research
新着情報 What's News
リンク Link


Mobile Robot Localization Using Pressure Sensors Under Floor [ June 2024 ~ Present ] |
Research Background |
|
Particle Filter-based Pose Estimation by Using Finite Element Method (FEM) In order to enable accurate localization of mobile robots and monitor the entire environment, it is essential to utilize the global information provided by ground-embedded sensors rather than just a limited field of view from camera or LiDAR. In this stydy, we propose a localization method based on the pressure distribution measured by an array of pressure sensors embedded under floor, as shown in Fig. 1. To this end, the FEM-based on the Kirchhoff–Love plate theory is employed to simulate the pressure response of the floor under the robot’s load. The predicted pressure distribution is then compared with the measured values using a particle filter, which updates the particle weights according to their similarity. As a result, the robot pose can be accurately estimated through iterative resampling, achieving robust localization even in visually challenging environments, as shown in Mov. 1. 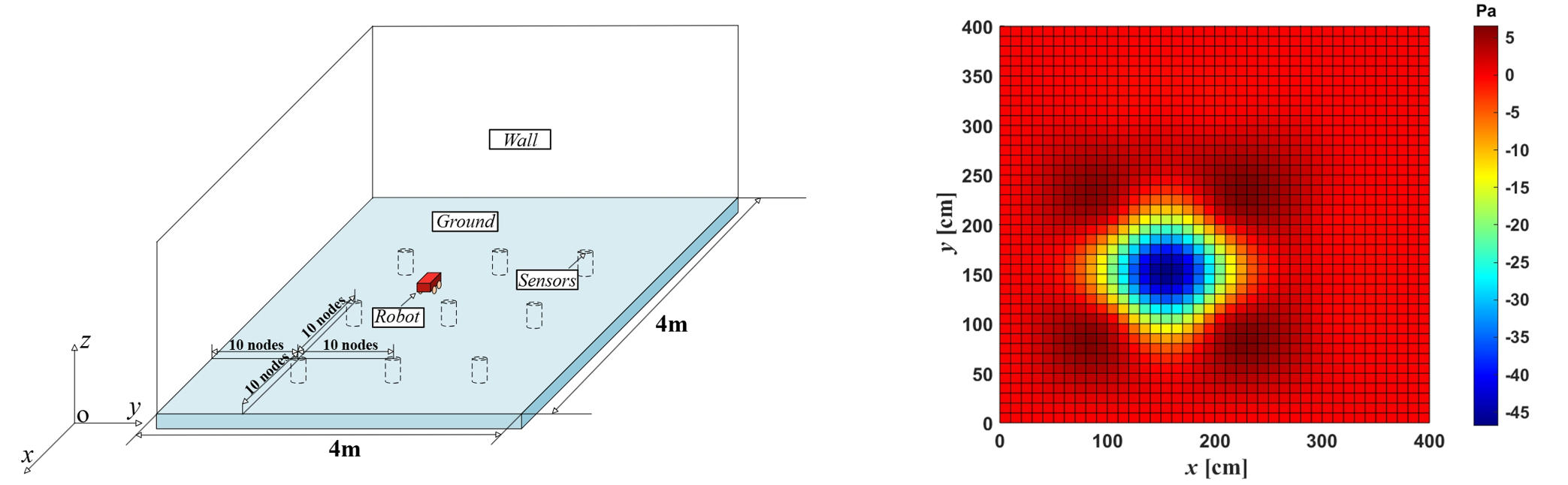 Mov. 1 Experimental results of robot trajectory estimation in real-world. |
Related Paper |
|
•陳 代炎楠, 池 勇勳, "FEM Stress Analysis for Mobile Robot Localization Using Pressure Sensors Under Floor," 第25回計測自動制御学会システムインテグレーション部門講演会(SI2024), 盛岡, December 2024. |