Research
新着情報 What's News
リンク Link


Motion Planning for Off-Road UGVs [ April 2015 ~ December 2018 ] |
Research Background |
|
Adaptive Motion Planning Based on Vehicle Characteristics and Regulations In recent years, autonomous mobile robots and UGVs have attracted the attention of many researchers, and are becoming capable of dealing with various environments. Safe and reliable motion planning for mobility is one of the most important requirements for such unmanned robots. However, there have been very few studies on establishing an outdoor motion planning methodology in off-load environments, despite the undeniable fact that it is an indispensable requirement to operate unmanned robots traveling on rough terrain such as disaster sites where hazards prohibit human access. When the UGV navigates autonomously on an off-road environment where rough terrain exists, the importance of avoiding accidents, such as collision and turnover, cannot be overemphasized in the sense of safe navigation. Therefore, the UGV is required to avoid such risks and to select a route within the traversable area. Hence, estimating the traversability and appropriate motion planning on rough terrain are very important tasks to meet these requirements. In this respect, we aim to propose a novel motion planning methodology for UGVs to navigate safely to a destination within convoluted environments, including rough terrain. When designing a novel motion planner, we need to consider the following. • All DoFs, namely the 6-DoFs of vehicular pose (position and orientation), which include height direction and roll and pitch angles. • The unique characteristics of each vehicle, such as the size of the vehicle, minimum turning radius, or travelable maximum inclination angle, depending on the driving speed. • Regulations necessary for vehicular operation depending on different situations, such as maintaining the driving speed and suppressing the change of posture. • Feasible processing time to identify a solution, even in relatively large-scale environments. The purpose of this research is to establish a novel motion planner for off-road UGVs, which addresses all the aforementioned issues. Specifically, when the user specifies the initial pose and the target pose of the UGV with respect to the environmental map composed of a 3D point cloud provided a priori, the motion planner should solve the problem of generating a path that connects these two states offline. We propose an adaptive methodology for global motion planning. Here, “adaptive” means that the proposed methodology enables to perform appropriate planning that satisfies different conditions defined from the vehicle characteristics and the regulations. A random sampling based scheme (Mov. 1) is applied to carrying out global path planning. In regard to the scale of the environment map, we have treated the scale spanning several hundred meters as large-scale in this study, and the proposed motion planner was applied to environmental maps with this size. Experimental results (Fig. 1) showed that the proposed off-road motion planner could generate an appropriate path, which satisfies vehicle characteristics and predefined regulations. Mov. 1 Random sampling based scheme for global motion planning. 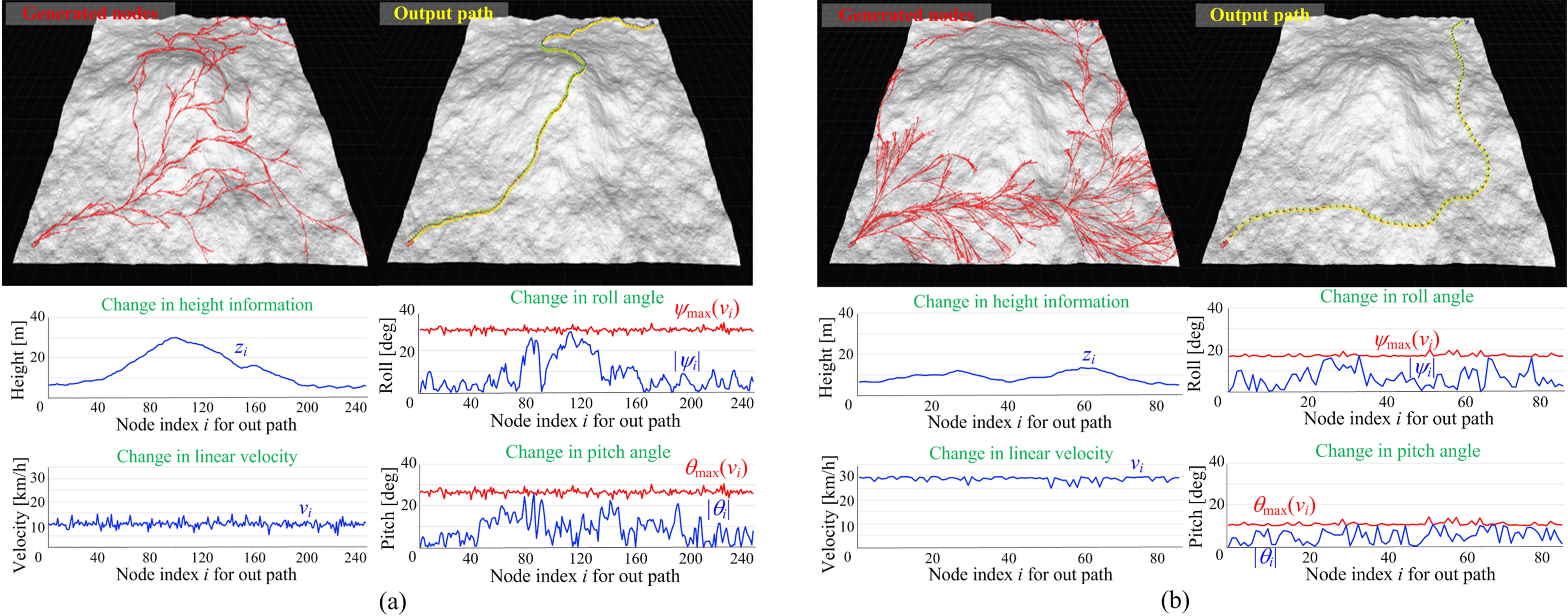 |
|
Autonomous End-to-end Motion Control of Exploration Robot Based on Deep Reinforcement Learning In this research, we propose a novel approach to allow exploration robots to solve navigation problems in complex environments including rough terrain. It is difficult for robots to autonomously navigate without prior information such as an environmental map. Recently, advances in deep reinforcement learning (DRL) have made it possible to complete the autonomous motion control without the map. In this respect, we apply DRL to realize fully autonomous navigation on rough terrain for the exploration robot. The exploration robot can generate suitable control motion converted from observed depth information through a neural network. Mov. 2 Autonomous Motion Control Using DRL for Exploration Robot on Rough Terrain. |
Related Paper |
|
• Zijie Wang, Yonghoon Ji, Hiromitsu Fujii, and Hitoshi Kono, "Autonomous Motion Control Using Deep Reinforcement Learning for Exploration Robot on Rough Terrain," Proceedings of the 2022 IEEE/SICE International Symposium on System Integration (SII2022), pp. 1021-1025, Narvik, Norway, January 2022. [doi:10.1109/SII52469.2022.9708814] • Shinya Katsuma, Hanwool Woo, Yonghoon Ji, Yusuke Tamura, Atsushi Yamashita, and Hajime Asama, "Efficient Motion Planning for Mobile Robots Dealing with Changes in Rough Terrain," Proceedings of the 1st IFAC Workshop on Robot Control (WROCO2019), pp. 460-463, Daejon, Korea, September 2019. • Yonghoon Ji, Yusuke Tanaka, Yusuke Tamura, Mai Kimura, Atsushi Umemura, Yoshiharu Kaneshima, Hiroki Murakami, Atsushi Yamashita, and Hajime Asama, "Adaptive Motion Planning Based on Vehicle Characteristics and Regulations for Off-Road UGVs," IEEE Transactions on Industrial Informatics, Vol. 15, No, 1, pp. 599 - 611, ISSN 1551-3203, January 2019. [doi:10.1109/TII.2018.2870662] (Impact Factor 7.377) • Yuki Doi, Yonghoon Ji, Yusuke Tamura, Yuki Ikeda, Atsushi Umemura, Yoshiharu Kaneshima, Hiroki Murakami, Atsushi Yamashita and Hajime Asama, "Robust Path Planning against Pose Errors for Mobile Robots in Rough Terrain," Advances in Intelligent Systems and Computing 867, Intelligent Autonomous Systems 15 (Marcus Strand, Rudiger Dillmann, Emanuele Menegatti and Stefano Ghidoni (Eds.)) (Proceedings of the 15th International Conference IAS-15, Held July 2018, Baden-Baden (Germany)), Springer, pp. 27-39, ISSN. 2194-5357, January 2019 (Online: eISSN. 2194-5365). [doi:10.1007/978-3-030-01370-7_3] • 田中 佑典, 池 勇勳, 山下 淳, 淺間 一, "移動ロボットの性能に応じた走行可能性推定が可能な不整地に対する走行可能性推定および行動生成手法," 精密工学会誌, Vol. 81, No. 12, pp. 1119-1126, ISSN 1348-8724, December 5 2015 (Online: eISSN 1881-8722). [doi:10.2493/jjspe.81.1119] • Yusuke Tanaka, Yonghoon Ji, Atsushi Yamashita, and Hajime Asama, "Fuzzy Based Traversability Analysis for a Mobile Robot on Rough Terrain," Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA2015), pp. 3965-3970, Seattle, USA, May 2015. [Link] |