Research
新着情報 What's News
リンク Link


Construction of Intelligent Space [ April 2014 ~ May 2019 ] |
Research Background |
|
Automatic Calibration of Camera Sensor Network Figure 1 (a) illustrates an example of the map information which is built by typical simultaneous localization and mapping (SLAM) schemes. However, considering human-robot coexistence environments, the map information, which is a static model, cannot deal with such dynamic environments because it cannot reflect changes in the environment (e.g., moving objects, etc.). On the other hand, the concept of an intelligent space, as illustrated in Fig. 1 (b), which constructs a distributed sensor network in an external environment, can monitor what is occurring in it. Distributed sensor networks installed in external environments can recognize various events that occur in the space, so that such intelligent space can be of much service in human–robot coexistence environments, as shown in Fig. 1 (b). Distributed camera sensor networks with multi-camera systems provide the most general infrastructure for constructing such intelligent space. In order to obtain reliable information from such a system, pre-calibration of all the cameras in the environment (i.e., determining the absolute positions and orientations of each camera) is an essential task that is extremely tedious. This research considers the automatic calibration method for camera sensor networks based on 3D texture map information of a given environment as shown in Fig. 1(a). In other words, this research solves a global localization problem for the poses of the camera sensor networks given the 3D texture map information. The proposed complete 6DOF calibration system in this research only uses the environment map information; therefore, the proposed scheme easily calibrates its parameters. The results shown in Mov. 1 demonstrate that the proposed system can calibrate complete external camera parameters successfully. 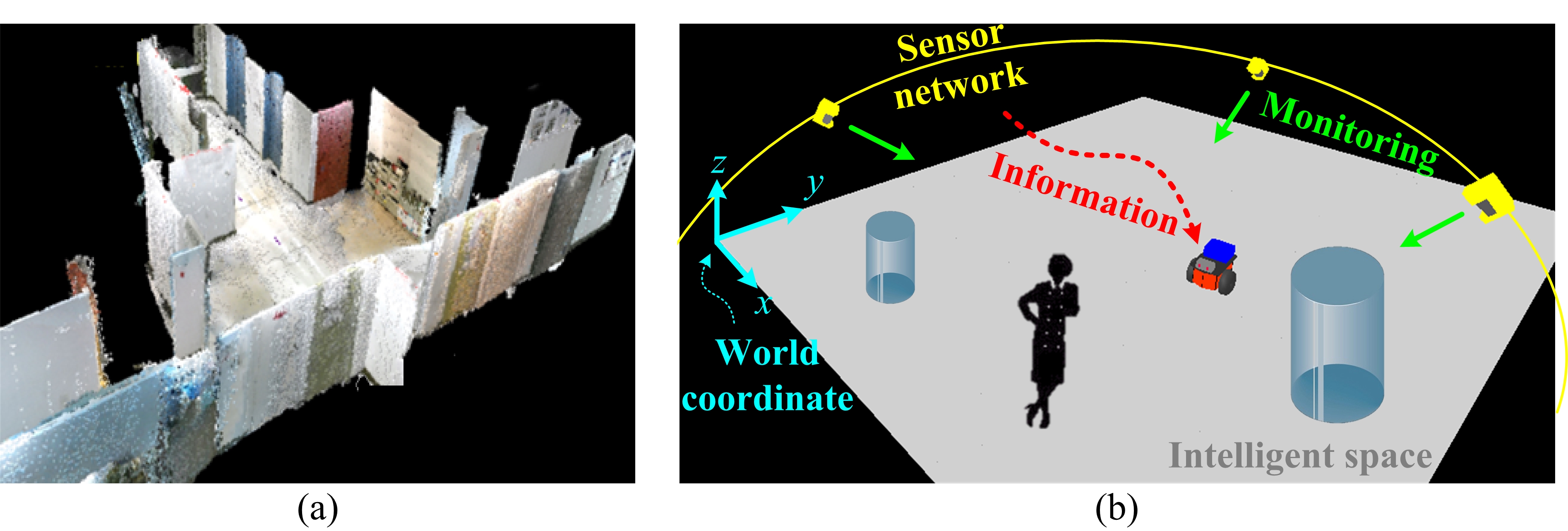 Mov. 1 Experimental results of automatic calibration of camera sensor network using wireless IP camera. |
|
Indoor Positioning System Based on Distributed Camera Sensor Network An importance of accurate position estimation in the field of mobile robot navigation cannot be overemphasized. In case of an outdoor environment, a global positioning system (GPS) is widely used to measure the position of moving objects. However, the satellite based GPS does not work indoors. This research proposes an indoor positioning system (IPS) that uses calibrated camera sensor networks for mobile robot navigation. The IPS information is obtained by generating a bird's-eye image from multiple camera images; thus, our proposed IPS can provide accurate position information when the moving object is detected from multiple camera views. We evaluate the proposed IPS in a real environment in a wireless camera sensor network. The results shown in Mov. 2 demonstrate that the proposed IPS based on the camera sensor network can provide accurate position information of moving objects. Mov. 2 Experimental results of IPS for mobile robot localization. |
Related Paper |
|
• Yonghoon Ji, Atsushi Yamashita, Kazunori Umeda, and Hajime Asama, "Automatic Camera Pose Estimation Based on a Flat Surface Map," Proceedings of the SPIE 11172, 14th International Conference on Quality Control by Artificial Vision (QCAV2019), Vol. 11172, pp. 111720X-1-111720X-6, Mulhouse, France, May 2019. [Link]
• 池 勇勳, 山下 淳, 梅田 和昇, 淺間 一, "人工物環境における直線情報を用いたカメラの外部パラメータ推定法," 第19回計測自動制御学会システムインテグレーション部門講演会講演論文集 (SI2018), 3B3-17, pp. 2598-2600, 大阪, December 2018. (SI2018優秀講演賞受賞) • Yonghoon Ji, Atsushi Yamashita, and Hajime Asama, "Automatic Calibration of Camera Sensor Network Based on 3D Texture Map Information," Robotics and Autonomous Systems, Vol. 87, pp. 313-328, ISSN 0921-8890, January 2017 (Online: October 5 2016). [doi:10.1016/j.robot.2016.09.015] (Impact Factor 2.928) • Yonghoon Ji, Atsushi Yamashita, and Hajime Asama, "Indoor Positioning System Based on Distributed Camera Sensor Networks for Mobile Robot," Advances in Intelligent Systems and Computing 531, Intelligent Autonomous Systems 14 (Weidong Chen, Koh Hosoda, Emanuele Menegatti, Masahiro Shimizu and Hesheng Wang (Eds.)) (Proceedings of the 14th International Conference IAS-14, Held July 2016, Shanghai (China)), Springer, pp. 1089-1101, ISSN. 2194-5357, February 2017 (Online: eISSN. 2194-5365). [doi:10.1007/978-3-319-48036-7] • Yonghoon Ji, Atsushi Yamashita, and Hajime Asama, "Automatic Calibration and Trajectory Reconstruction of Mobile Robot in Camera Sensor Network," Proceedings of the 11th Annual IEEE International Conference on Automation Science and Engineering (CASE2015), pp. 206-211, Gothenburg, Sweden, August 2015. [Link] |